![]()
This project demonstrates how Dynamic Neural Field (DNF) control architectures can be automatically evolved using NEAT-DNFs, producing adaptive and interpretable controllers for human–robot collaboration.
Traditional DNF-based robot controllers are manually designed. In this project, robot control architectures are automatically synthesized through evolution, including:
- Neural field parameters
- Network topology
- Inter-field interactions
- Behavioral coordination strategies
The evolved controllers enable robots to:
- Assist humans when cooperation is required
- Act independently when possible
- Withhold action when interference would occur
This results in adaptive joint action behavior emerging from neural dynamics rather than predefined logic.
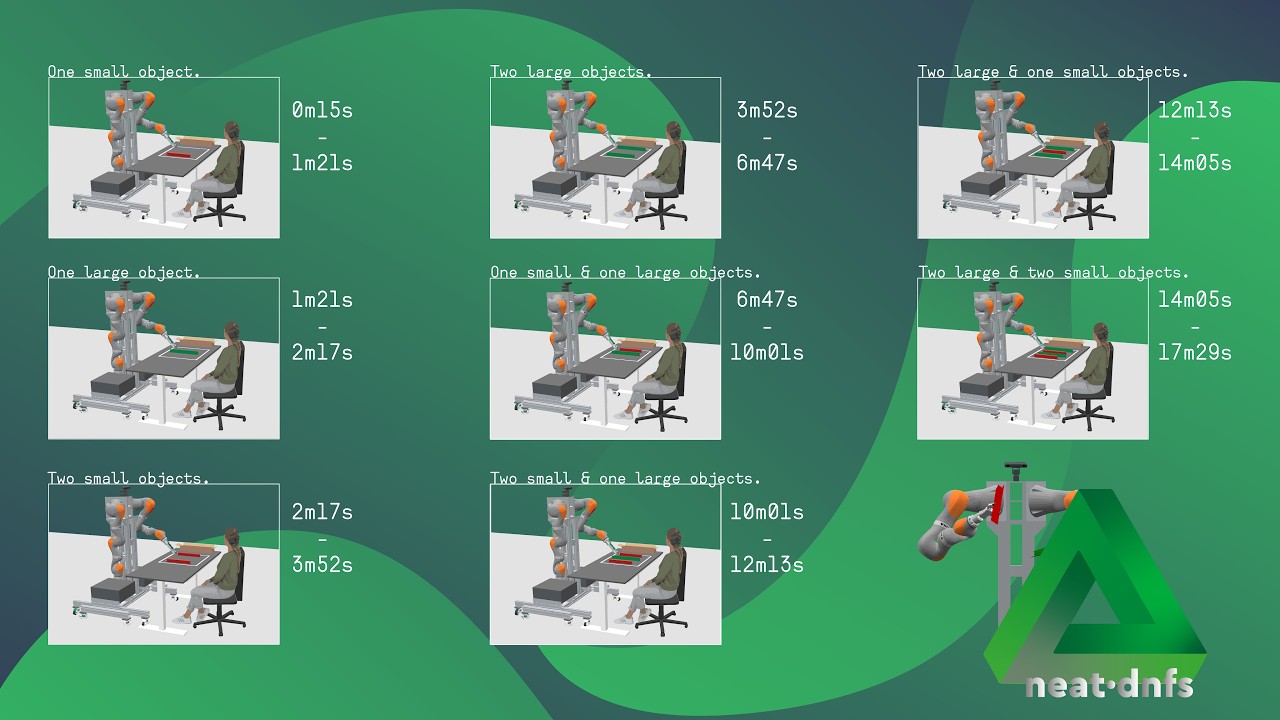
The system was evaluated in a collaborative packaging task where a human and robot manipulate objects together.
| Situation | Robot Behaviour |
|---|---|
| Human approaches large object | Robot assists |
| Human approaches small object | Robot selects another small object |
| Only one small object available | Robot does nothing |
The controller operates on a continuous spatial representation using Dynamic Neural Fields.

The system is composed of three main components:
-
Vision Node
- Detects objects and human hand position
-
High-Level Controller
- Evolved Dynamic Neural Field controller
-
Low-Level Controller
- Motion planning and robot control (MoveIt 2)
Vision → DNF Controller → Motion Planning → Robot
The controller itself is evolved using NEAT-DNFs, which evolves:
- Neural field parameters
- Field interactions
- Network topology
- Hidden processing fields
├── launch/
├── msg/
├── src/
│ ├── high_level_control_node.cpp
│ ├── low_level_control_node.cpp
│ ├── vision_processing_node.py
│ └── controlled_scenarios/
├── data/ # Evolved DNF controllers
├── resources/ # Figures and diagrams
├── CMakeLists.txt
├── package.xml
└── README.md
| Dependency | Purpose | Link |
|---|---|---|
| ROS 2 Humble Hawksbill | Core middleware | docs.ros.org/en/humble |
| MoveIt 2 | Motion planning | moveit.ros.org |
| KUKA LBR-Stack | FRI integration for iiwa | JOSS Paper |
| OnRobot ROS 2 Driver | RG2 gripper control | tonydle/OnRobot_ROS2_Driver |
| dynamic-neural-field-composer | DNF simulation library | Jgocunha/dynamic-neural-field-composer |
| vcpkg | External dependency manager | vcpkg.io |
System Requirements: Ubuntu 22.04, GCC ≥ 10, Python ≥ 3.8, OpenCV, NumPy
⚠️ Before hardware deployment, see the Wiki.
The evolutionary process was evaluated across 100 independent runs.
| Metric | Result |
|---|---|
| Success rate | 97% (97/100 runs) |
| Avg. generations to converge | 62.58 |
| Median generations | 53 |
| Std. deviation | 35.61 |
| Typical architecture size | ~1–2 hidden fields |
| Transfer to hardware | No parameter retuning required |
- Evolution consistently discovered minimal architectures.
- Most successful controllers contained one hidden field.
- Structural innovation followed by parameter tuning was key to success.
- Controllers evolved in simulation transferred directly to the physical robot.
- Behaviour generalized to unseen object configurations and spatial arrangements.
The evolved controllers autonomously produced:
- Cooperative behaviour
- Complementary action selection
- Action inhibition
All behaviours emerged from dynamic neural field interactions, not from predefined logic or symbolic planning.

For a full exploration of the repository, refer to the Wiki.
- Amari, Shun-ichi (1977) - "Dynamics of pattern formation in lateral-inhibition type neural fields"
- Schöner, Gregor and Spencer, John and Research Group, Dft (2015) - "Dynamic Thinking: A Primer on Dynamic Field Theory"
- Nolfi, Stefano and Floreano, Dario (2000) - "Evolutionary robotics: the biology, intelligence, and technology of self-organizing machines"
- Floreano, Dario (2023) - "Bio-Inspired Artificial Intelligence: Theories, Methods, and Technologies"
- Erlhagen, Wolfram and Bicho, Estela (2006) - "The dynamic neural field approach to cognitive robotics"
- Krichmar, Jeffrey L. (2018) - "Neurorobotics — A Thriving Community and a Promising Pathway Toward Intelligent Cognitive Robots"
- Stanley, Kenneth O. and Miikkulainen, Risto (2002) - "Evolving Neural Networks through Augmenting Topologies"
- Erlhagen, Wolfram and Bicho, Estela (2014) - "A Dynamic Neural Field Approach to Natural and Efficient Human-Robot Collaboration"
- Pfeifer, Rolf and Bongard, Josh (2006) - "How the Body Shapes the Way We Think: A New View of Intelligence"
- Coombes, Stephen and Beim Graben, Peter and Potthast, Roland and Wright, James (2014) - "Neural fields: theory and applications"